- 56-1167-9188
- ventas@gcidemexico.com.mx
¿Qué es un Servomotor?
Publicado el 9 de febrero del 2020 a las 10:00 p.m.
Por definición un servomotor es un motor con retroalimentación que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable en dicha posición.Esta actividad lo hace gracias a que en el eje del motor hay un encoder y este junto con el servomotor se comunican con un servodrive, podríamos decir por lo tanto que el servodrive es el encargado de controlar la posición y la velocidad del motor..

El servodrive tiene un principio de operación muy similar al variador de frecuencia, véase Variadores de frecuencia en el blog de GCI de México.
Las características principales de un servomotor son el par y la velocidad.
El par: Es la fuerza capaz de desarrollar en el eje, también lo llamaremos torque, suele expresarse en Nm, a mayor par mayor corriente de consumo del servomotor. Un punto importante en lo servomotores es que pueden mantener el torque máximo en cualquier rango de velocidad.
Velocidad: Serán las vueltas que dé el eje del motor en un minuto (RPM).
Componentes de un servomotor
Algunos componentes del servomotor son:
- Estator
- Rotor
- Devanados
- Encoder
- Conexión de cable de encoder
- Conexión de cable de alimentación de motor
- Eje
- Freno (opcional)
Encoder
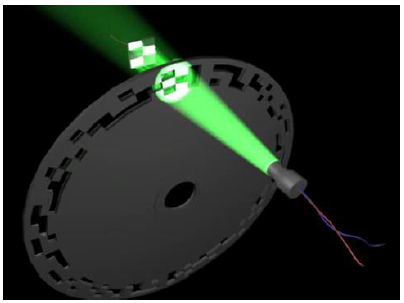
Para los ingenieros de CGI de México el encoder es una principal característica del servomotor, ya que dependiendo del tipo de esté es la aplicación a desarrollar. El encoder se compone básicamente de un disco conectado a un eje giratorio. El disco esta hecho de vidrio o plástico y se encuentra “codificado” con unas partes transparentes y otras opacas que bloquean el paso de la luz emitida por la fuente de luz (típicamente emisores infrarrojos). En la mayoría de los casos, estas áreas bloqueadas (codificadas) están arregladas en forma radial. A medida que el eje rota, el emisor infrarrojo emite luz que es recibida por el sensor óptico (o foto-transistor) generando los pulsos digitales a medida que la luz cruza a través del disco o es bloqueada en diferentes secciones de este. Esto produce una secuencia que puede ser usada para controlar el radio de giro, la dirección del movimiento e incluso la velocidad.

Encoder incremental: Generan un número exactamente definido de pulsos por revolución. Estos indican la distancia angular y lineal recorrida. Son generalmente los más utilizados, ya que con ellos se cumple más del 70% de las aplicaciones, movimiento de antenas, corte al vuelo de varillas, sellado de bolsas, entre muchas otras.
Encoder absoluto: Asigna a cada posición angular un valor inequívoco, incluso durante varias revoluciones. Se usan para aplicaciones donde se desea que el valor recorrido o actual no se borre, aún cuando el equipo está apagado, por ejemplo en robots donde a pesar de un apagón este debe saber en donde está y continuar el movimiento.
Freno

El freno es un componente opcional de un servomotor, este es muy útil y necesario cuando las cargas son de elevación o aplicaciones de condiciones similares, esto debido a que si la energía eléctrica se llegará a interrumpir inmediatamente entra el freno y la carga no se caería previniendo accidentes laborales, ya que la parte más importante en una empresa es el personal que labora día a día.
La alimentación del freno es independiente de las salidas del servodrive, y se recomienda tener una señal activa hacia el drive para que este en monitoreo todo el tiempo el estatus del freno.
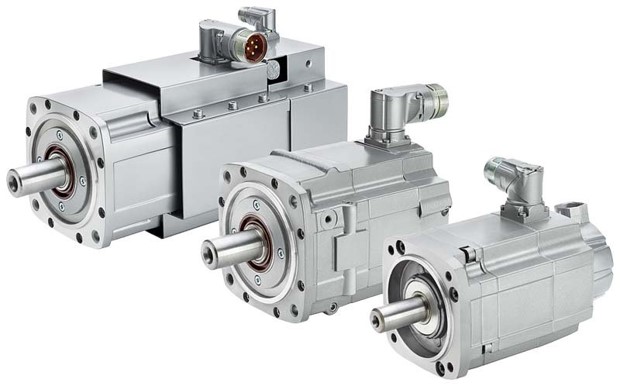
Inercia de un servomotor
Un aspecto importante en tema de los servomotores es la inercia, en internet se encuentran muchas definiciones y ecuaciones para calcularla, pero en GCI de México les queremos dar una definición simple: Un servomotor justo a una aplicación dada puede tener el torque necesario para mover una carga X a una velocidad Y, pero si la velocidad aumenta y los tiempos de aceleración y desaceleración disminuyen, podrá moverla, pero no podrá parar la carga y esto debido a que la inercia de la carga aumento. Por esta razón tenemos servomotores que pueden ser de la misma potencia y tener diferentes frames por ejemplo: un servomotor de 1Kw puede tener un frame de 10cm, 13cm o 18cm, lo que va a cambiar es fuerza de inercia que pueda desarrollar. Cuando vamos a colocar un servomotor es necesario determinar si será de baja, media o alta inercia.
Formas de control de un servomotor

La tecnología respecto al servomotor y servodrive a avanzado en grandes medidas, anteriormente el control se tenia lejos del servomotor, actualmente se busca que el control este cerca de este; por lo tanto, un servomotor se puede manejar por los siguientes métodos e incluso hacer mezclas de algunos:
- Entradas/Salidas: Es una forma básica de programación donde a través de una señal analógica y digital se pueden accionar diferentes funciones del servomotor.
- PR: Perfil de rotación, son parámetros internos del servodrive para poder controlar el servomotor sin necesidad de algún PLC. Además gracias a esta opción es posible conectar un HMI (pantalla) al servodrive y hacer aplicaciones un poco más demandantes.
- Pulso/Dirección: En este tipo de control algún dispositivo envía un tren de pulso al servodrive y este accionará el servomotor dependiendo de la parametrización dada.
- Comunicación: Es la forma más completa y compleja de controlar el servomotor, ya que un PLC coordina todo las acciones que el equipo deberá hacer.
Como seleccionar un servomotor
AL momento de recomendar un servomotor y un servodrive para alguna aplicación es necesario tener en cuenta los siguientes puntos.
- Aplicación
- Alimentación
- Potencia requerida para trabajar la carga (torque e inercia).
- Método o forma de control
- Tipo de encoder a utilizar
- Se requiere que el equipo tenga freno
- Cables de programación
- Software (libre o de licencia)